Got info on the entry to the call for the Robophilosophy Conference: Its an invitation to do the workshop as proposed! Olivers idea is to fuse humanities and performance art discourses under…

Conference “Ignorance within the space of knowledge” was held at the main library of Upper Austria, in the city of Linz. Christoph Hubatschke and Oliver Schürer…
“For the second time, the Vienna Humanities Festival brings together personalities from the fields of scholarship, art, and culture for a sustained and inspiring exchange of ideas.” Initiated by the…
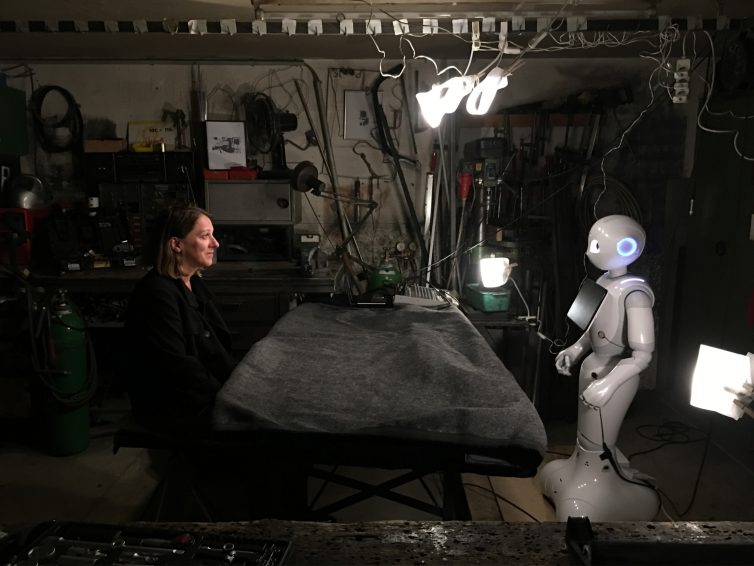
Our performance concept of “The Robot is Present” (read here, and here) refers to Marina Abramovic performance „The Artist is Present“ – and turns it inside out. A visitor is…
Performance at Art Festival “The Future of Demonstration; Vermögen” – October 31 – November 11, 2017
The Festival “… is an art series that engages with the transformation towards post-global ecologies and societies by exploring the notion of demonstration and its technological, political, pedagogical and aesthetic capacities.”…
At the Stadtwerkstatt Ars Electronica series 48×3, in cooperation with „Quasikunst“. Scroll down for the German text. „The reproduced artwork increasingly becomes the reproduction of an artwork designed to be…