The text of “An applied ethics to liaise humanoids with humans” is derived from a lecture, held at the at the Robophilosophy Conference 2018„Envisioning Robots in Society—Politics, Power, and Public…
The text of “An applied ethics to liaise humanoids with humans” is derived from a lecture, held at the at the Robophilosophy Conference 2018„Envisioning Robots in Society—Politics, Power, and Public…

Lecture-performance by Oliver Schürer, Eva-Maria Kraft and Christoph Müller (H.A.U.S.) delighted to cooperate with Rupert Huber, 20.11.2018. ESF
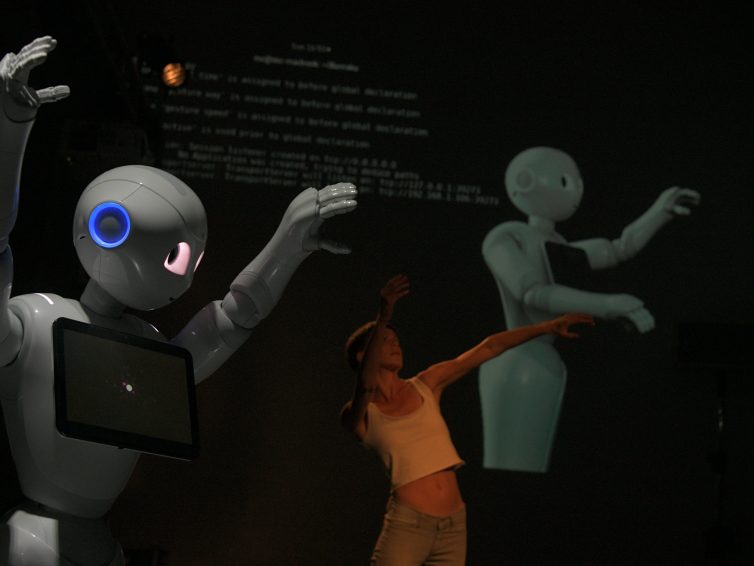
H.A.U.S. announces its Vienna sneek preview of the Doppelganger research cycle, the human-humanoid dance performance on 27.9.2018, 21:15, at LABfactory reloaded, Jot 12, Seestadt Aspern. “Ningyō Jōruri 人形浄 瑠 – 璃 2,“ embodied AI in…

Lecture-performance by Oliver Schürer, Eva-Maria Kraft and Christoph Müller (H.A.U.S.) 19.09.2018

H.A.U.S. at the “Kre:π performance art festival” at Banska Bystrica, Slovakia, 30.8.-2.9.2018, Dance-performance and Discourse. Dance-performance by Eva and Machina 1.9., 20h Teaser video Discourse “ENTROPY – and the reconstruction…
we got invited to do presentations at the huge, self proclaimed, “Woodstock of Developers.” Chris and Katharina are conducting public experiments with our Architectural space-game generating a Cultural space-model there.…