Workshop “Trust in Robotic Systems” at conference “Developing Support Technologies, Integrating Multiple Perspectives to Create Assistance that People Really Want”
Workshop „Vertrauen in robotische Systeme“
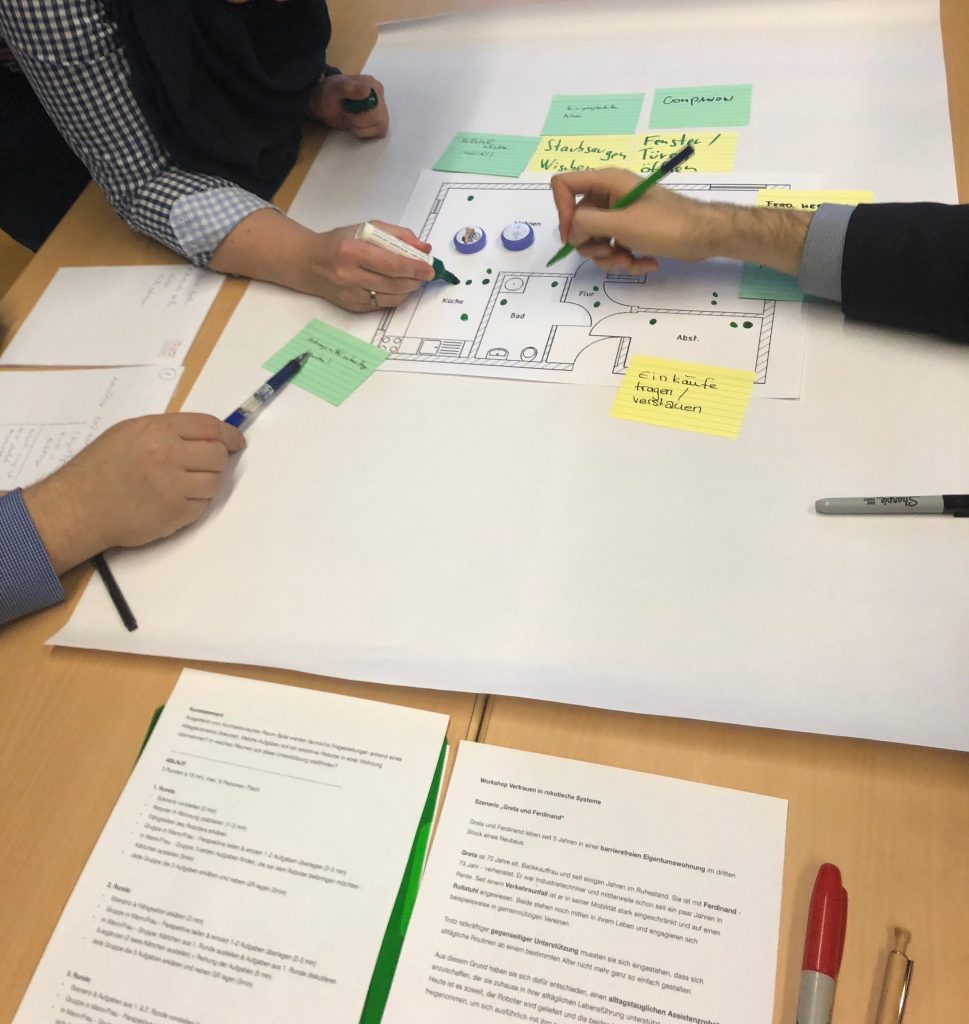
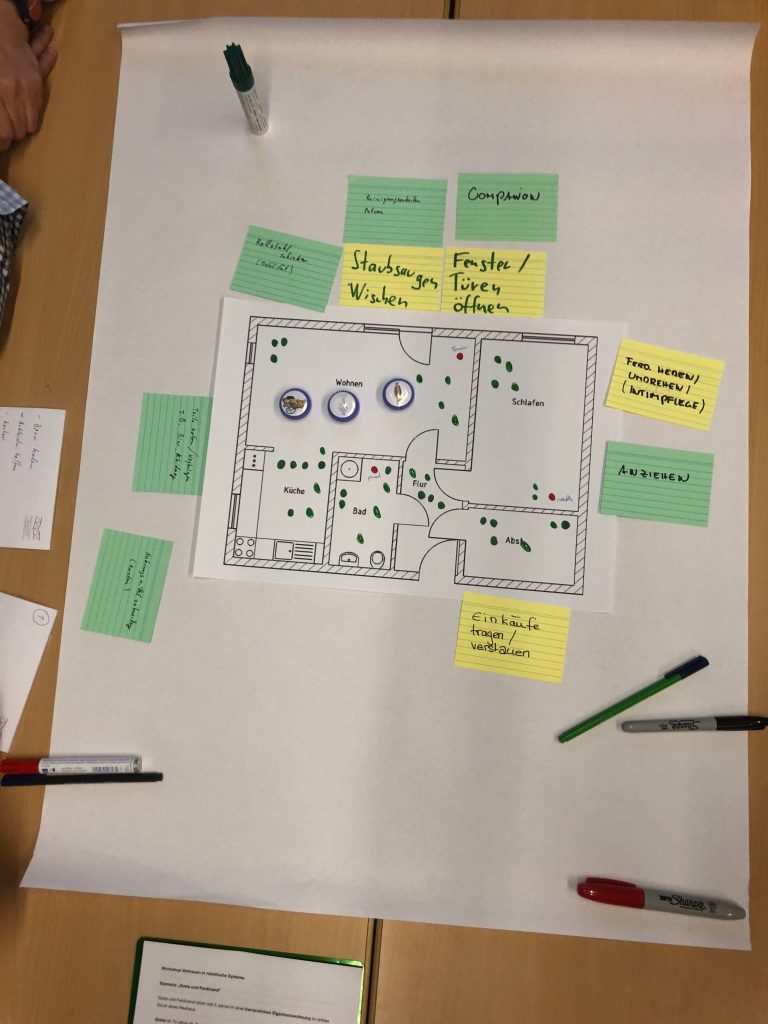
Um mit robotischen Systemen in unmittelbarer Nähe umzugehen, brauchen Menschen eine Art grundlegende Hypothese als Antizipation über das zukünftige Verhalten dieser Systeme: Vertrauen. Wie kann ein robotisches Instrument, etwa ein humanoider Roboter, Vertrauen erwecken? Wie kann ein dauerhaftes Verhältnis von Vertrauen zwischen Menschen und robotischen Systemen aufrechterhalten werden? Zur Diskussion gestellt wird der Prototyp eines Raum‐Modells (KRM) als Basis für die Interaktion mit robotischen Systemen. Es wird vermittels sprachlicher und nonverbaler Kommunikation in einer Art Sprachspiel (ARS) realisiert. Modell und Spiel wurden von der Forschungsgruppe H.A.U.S. transdisziplinär entwickelt. Das damit erreichte vertraute Verhalten eines Systems soll Vertrauen bei seinen Benutzern erwecken und erhalten. Im Workshop‐Format eines (World‐Cafe) werden nach einem kurzen Impuls drei Themenbereiche aufgespannt. In Folge werden mit den Teilnehmerinnen, an drei Diskussionstischen, gemeinsame Antworten auf ausgewählte Fragen erarbeitet.
Leitung: Oliver Schürer, Christoph Hubatschke, Christoph Müller und Benjamin Stangl (TU Wien, Uni Wien)
Autonomie, Mobilität und Entscheidungskompetenz lassen robotische Systeme nicht mehr als Werkzeuge, sondern vielmehr als kooperierende Instrumente auftreten. Ihre inhärente Komplexität macht lineares Antizipieren ihrer Zuverlässigkeit unmöglich. Deshalb brauchen Menschen, die mit robotischen Systemen umgehen, eine andere Art Hypothese über deren zukünftiges Verhalten: Vertrauen. Damit wird die kognitiv unwägbare Komplexität dieser Apparate in einen positiv besetzten Affekt komprimiert, der mit Erfahrung entsteht und wächst.
Wie kann ein robotisches Instrument,
etwa ein humanoider Roboer Vertrauen erwecken? Wie kann ein dauerhaftes
Verhältnis von Vertrauen zwischen Menschen und robotischen Systemen
aufrechterhalten werden?
Um diese und weitere Fragen diskutieren zu können, wird der Prototyp eines
technischen Systems vorgestellt. Transdisziplinär entwickelt, in einer
Zusammenarbeit aus Architektur, HRI, KI-Forschung, Performance Kunst und
Philosophie.
Workshop Themen:
KULTURELLER RAUM.
(Vortrag Schürer)
Für die Entwicklung des Konzepts wurde die Behauptung der Neutralität von Raum und Technologie hinterfragt. Das System wird nicht als neutrales Ding verstanden, sondern als räumlich verkörperte, soziale Rolle. Vertrauen der Menschen entsteht (1) aus der Erfahrung von kompetenten, integren und wohlwollenden Verhalten und (2) aus Identifikation mit Zielen und Bedürfnissen sowie Übereinstimmung in Wert- und Wissensformationen. Dies wurde im Konzept zum System als Kulturelles Raum-Modell in einer KI entwickelt. Es wird im Architektonischen Raum-Spiel (hier im Blog auch bezeichnet mit Space-Game, ASG) durch sprachliche und non-verbale Interaktion zwischen Mensch und Roboter permanent adaptiert.
(UN)HEIMLICHE BEZIEHUNG.
(World Cafe Tabel Christoph Hubatschke)
Nach welchen Vorstellungen kann die soziokulturelle Rolle humanoider Roboter entwickelt werden? Dazu wird die politisch-ethischen Fragestellungen im Verhältnis Roboter-Mensch hinterfragt. Thematisiert mit einer kritischen Neu-Lektüre des Roboterbegriffs und dessen Rezeptionsgeschichte, zwischen den Eigenschaften unheimlich (uncanny valley) und pflegend (care work). Aufbauend auf Donna Haraways Ansatz der companion species und dem was sie cross-species-trust nennt, wird das politisch-ethisches Konzept der “Konfidenz” entworfen und zur Diskussion gestellt. Dauerhaftes Vertrauen ist von Wechselseitigkeit geprägt.
VERKÖRPERTE KI.
(World Cafe Tabel Christoph Müller)
Das Konzept ist technisch in einem Prototyp realisiert: verschiedene KI-Module, Programmierung der dynamischen Bewegungen zu non-verbalen Gesten und sprachliche Äußerungen. Gezeigt wird wie durch das Zusammenwirken der technischen Komponenten, (1) Gesten und Sprache unterschiedlicher Ausdruck simuliert wird, (2) Lernen und Raumerfassung des Machine-learning-systems in Echtzeit laufen, (3) die Simulation vom Vertrauen des Roboters in Personen, Umgebungen und Gegenständen, etwa im Pflegekontext, entsteht.
HEIMELIGE ROBOTER. VERKÖRPERTE KI.
(World Cafe Tabel Benjamin Stangl)
Entscheidungen und Handlungen robotischer Systeme finden in Räumen statt und werden ihrem sozialen Kontext bewertet. Neben den zweckdienlichen Funktionen werden Roboter auch eine Schnittstelle zu Gebäudeautomation und Internetdienstleistungen sein. Dadurch werden sensible Bereiche wie Sicherheit, Privatheit und Wohlergehen auf Assistenzsysteme übertragen. Vorgestellt wird, auf welchen Ebenen und durch welche Prozesse soziale Räume an der Konstitution von Vertrauen beteiligt sind. Die ABSCHLIEßENDE DISKUSSION öffnet dem Publikum die unterschiedlichen Aspekte vom Prototyp eines technischen Systems und den ethischen Fragen der Pflege, philosophisch, technisch, künstlerisch und architektonisch.